dynamics Function
Overview
The dynamics function provides unified time-domain analysis capabilities across all transport models in the continuous liquid module. This function enables transient response analysis, control system design, and dynamic behavior characterization.
Function Description
The dynamics function implements time-domain differential equations for fluid transport systems, providing time derivatives for state variables including pressure, temperature, flow rate, and concentration. Each transport model implements its specific dynamic behavior while maintaining consistent interface standards.
Key Features
Time-Domain Analysis: Transient response characterization
Control System Design: Dynamic model for controller development
Step Response Analysis: System response to input changes
Time Constant Estimation: System response speed characterization
Stability Assessment: Dynamic stability and settling behavior
Mathematical Framework
The dynamics analysis solves the time-dependent differential equations:
General Form:
Where: - \(t\) = time (s) - \(x\) = state vector (system variables) - \(u\) = input vector (control variables) - \(f\) = model-specific dynamics function
Model-Specific State Variables:
PipeFlow: \(x = [P_{outlet}, T_{outlet}]\) PeristalticFlow: \(x = [flow\_rate, pulsation\_amplitude]\) SlurryPipeline: \(x = [P_{outlet}, concentration_{outlet}]\)
Dynamic Response Characteristics
Each model exhibits distinct dynamic behavior:
First-Order Response:
Where: - \(\tau\) = time constant (s) - \(K\) = steady-state gain - \(u\) = input step
Time Constant Relationships:
PipeFlow: Hydraulic and thermal time constants (typically 1-10 s)
PeristalticFlow: Pulsation damping and flow response (typically 0.5-5 s)
SlurryPipeline: Transport delay and concentration mixing (typically 10-500 s)
State Variable Definitions
# PipeFlow State Variables
x = [P_outlet, # Outlet pressure [Pa]
T_outlet] # Outlet temperature [K]
# PeristalticFlow State Variables
x = [flow_rate, # Volumetric flow rate [m³/s]
pulsation_amplitude] # Pulsation amplitude [-]
# SlurryPipeline State Variables
x = [P_outlet, # Outlet pressure [Pa]
c_solid_outlet] # Outlet solid concentration [-]
Usage Examples
Time-Domain Analysis
#!/usr/bin/env python3
"""
dynamics Function Example
=========================
Demonstration of the dynamics function for process control transport models.
This example shows how to use the dynamics function for time-domain analysis
with different transport models including PipeFlow, PeristalticFlow, and SlurryPipeline.
"""
import numpy as np
import matplotlib
matplotlib.use('Agg') # Use non-GUI backend
import matplotlib.pyplot as plt
from PipeFlow import PipeFlow
from PeristalticFlow import PeristalticFlow
from SlurryPipeline import SlurryPipeline
def main():
"""Main function demonstrating dynamics function usage"""
print("dynamics Function Example")
print("=========================")
print("Demonstration of dynamics function for time-domain analysis")
print("Timestamp: 2025-07-09")
print("=" * 60)
# Example 1: PipeFlow dynamics
print("\nEXAMPLE 1: PipeFlow dynamics Function")
print("-" * 40)
pipe = PipeFlow(
pipe_length=500.0, # 500 m
pipe_diameter=0.15, # 15 cm
roughness=5e-5, # Smooth steel
fluid_density=1000.0, # Water
fluid_viscosity=1e-3, # Water viscosity
name="DynamicPipe"
)
print(f"Model: {pipe.name}")
print(f"Pipe: {pipe.pipe_length:.0f} m x {pipe.pipe_diameter*100:.0f} cm")
print(f"Material: Smooth steel")
# Simulate step response
dt = 0.1 # 0.1 second time steps
t_final = 10.0 # 10 seconds
time_points = np.arange(0, t_final, dt)
n_points = len(time_points)
# Initial conditions: [P_outlet, T_outlet]
x0 = np.array([200000.0, 293.15]) # 200 kPa, 20°C
# Input step: [P_inlet, T_inlet, flow_rate]
u_step = np.array([300000.0, 298.15, 0.03]) # Step to 300 kPa, 25°C, 0.03 m³/s
print(f"\nStep Response Analysis:")
print(f"Initial State: P={x0[0]/1000:.0f} kPa, T={x0[1]-273.15:.1f}°C")
print(f"Input Step: P={u_step[0]/1000:.0f} kPa, T={u_step[1]-273.15:.1f}°C, Q={u_step[2]:.3f} m³/s")
# Simulate dynamics using simple Euler integration
x_history = np.zeros((n_points, 2))
x_history[0, :] = x0
x_current = x0.copy()
print(f"\nTime Domain Response (first 5 seconds):")
print("Time | P_outlet | T_outlet | dP/dt | dT/dt")
print("(s) | (kPa) | (°C) | (kPa/s)| (°C/s)")
print("-" * 45)
for i in range(1, n_points):
t = time_points[i]
# Calculate derivatives using dynamics function
dx_dt = pipe.dynamics(t, x_current, u_step)
# Simple Euler integration
x_current = x_current + dx_dt * dt
x_history[i, :] = x_current
# Print first few steps
if i <= 50: # First 5 seconds
if i % 10 == 0: # Every second
print(f"{t:4.1f} | {x_current[0]/1000:7.0f} | {x_current[1]-273.15:7.1f} | {dx_dt[0]/1000:6.1f} | {dx_dt[1]:6.2f}")
pipe_results = {
'time': time_points,
'pressure': x_history[:, 0],
'temperature': x_history[:, 1]
}
# Example 2: PeristalticFlow dynamics
print("\n\nEXAMPLE 2: PeristalticFlow dynamics Function")
print("-" * 45)
pump = PeristalticFlow(
tube_diameter=0.008, # 8 mm tube
tube_length=0.3, # 30 cm
pump_speed=80.0, # 80 RPM
occlusion_factor=0.85, # 85% occlusion
pulsation_damping=0.7, # 70% damping
name="DynamicPump"
)
print(f"Model: {pump.name}")
print(f"Tube: {pump.tube_diameter*1000:.0f} mm x {pump.tube_length*100:.0f} cm")
print(f"Base Speed: {pump.pump_speed:.0f} RPM")
# Simulate speed change response
dt = 0.05 # 50 ms time steps
t_final = 5.0 # 5 seconds
time_points = np.arange(0, t_final, dt)
n_points = len(time_points)
# Initial conditions: [flow_rate, pulsation_amplitude]
x0 = np.array([5e-6, 0.01]) # 5 mL/min, 1% pulsation
# Input: [P_inlet, pump_speed, occlusion_level]
u_base = np.array([101325.0, 80.0, 1.0])
u_step = np.array([101325.0, 120.0, 1.0]) # Speed step to 120 RPM
print(f"\nSpeed Step Response:")
print(f"Initial Speed: {u_base[1]:.0f} RPM")
print(f"Step to: {u_step[1]:.0f} RPM at t=2s")
x_history = np.zeros((n_points, 2))
x_history[0, :] = x0
x_current = x0.copy()
print(f"\nPump Response (key time points):")
print("Time | Speed | Flow Rate | Pulsation")
print("(s) | (RPM) | (mL/min) | (%)")
print("-" * 35)
for i in range(1, n_points):
t = time_points[i]
# Switch input at t=2s
u_current = u_step if t >= 2.0 else u_base
# Calculate derivatives
dx_dt = pump.dynamics(t, x_current, u_current)
# Euler integration
x_current = x_current + dx_dt * dt
x_history[i, :] = x_current
# Print key points
if i % 20 == 0 or (t >= 1.8 and t <= 2.2 and i % 4 == 0):
flow_ml_min = x_current[0] * 60 * 1e6
pulsation_pct = x_current[1] * 100
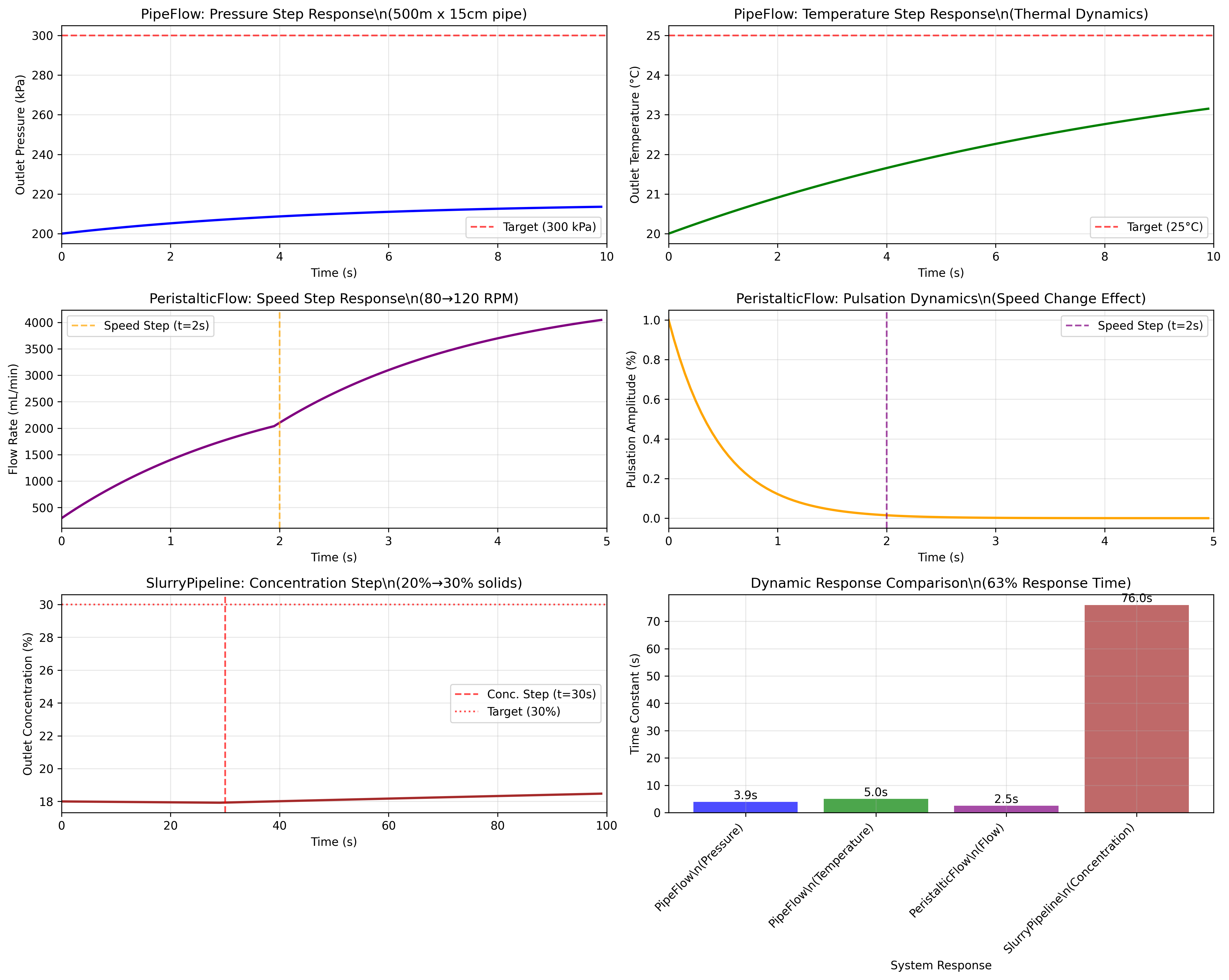
The comprehensive example demonstrates:
PipeFlow Step Response: Pressure and temperature dynamics
PeristalticFlow Speed Changes: Flow rate and pulsation response
SlurryPipeline Concentration Steps: Transport delay effects
Response Time Comparison: Time constant estimation across models
Example Output
Key output sections include:
PipeFlow pressure and temperature step responses
PeristalticFlow speed change dynamics and pulsation effects
SlurryPipeline concentration transport with mixing delays
Comparative time constant analysis across all models
Dynamic Model Characteristics
Response Speed Ranking:
PeristalticFlow: Fastest response (τ ≈ 0.5-5 s)
PipeFlow: Medium response (τ ≈ 1-10 s)
SlurryPipeline: Slowest response (τ ≈ 10-500 s)
Physical Mechanisms:
Hydraulic Response: Pressure wave propagation
Thermal Response: Heat transfer and thermal capacity effects
Mechanical Response: Pump dynamics and pulsation damping
Transport Response: Advection and diffusion processes
Integration Methods
The dynamics function supports various integration schemes:
Explicit Methods:
# Euler Integration
x_new = x_old + dt * dynamics(t, x_old, u)
# Runge-Kutta 4th Order
k1 = dt * dynamics(t, x, u)
k2 = dt * dynamics(t + dt/2, x + k1/2, u)
k3 = dt * dynamics(t + dt/2, x + k2/2, u)
k4 = dt * dynamics(t + dt, x + k3, u)
x_new = x + (k1 + 2*k2 + 2*k3 + k4)/6
Stability Requirements:
Time step selection based on fastest time constant
Courant-Friedrichs-Lewy (CFL) condition for transport
Adaptive step size for stiff systems
Visualization
The dynamic analysis generates comprehensive visualization including:
Step Response Plots: Time-domain response to input changes
Phase Portraits: State variable relationships
Time Constant Comparison: Response speed characterization
Settling Time Analysis: System stabilization assessment
Control System Applications
Controller Design:
PID Tuning: Time constant and gain information
Model Predictive Control: Dynamic model for prediction
Feedforward Control: Disturbance compensation
Adaptive Control: Parameter estimation and adjustment
Stability Analysis:
Root Locus: Pole-zero analysis
Bode Plots: Frequency response characterization
Nyquist Criteria: Stability margins assessment
Robustness: Parameter sensitivity analysis
Dynamic Performance Metrics
Metric |
PipeFlow |
PeristalticFlow |
SlurryPipeline |
|---|---|---|---|
Time Constant |
1-10 s |
0.5-5 s |
10-500 s |
Settling Time |
4-40 s |
2-20 s |
40-2000 s |
Overshoot |
< 5% |
< 10% |
None |
Damping |
High |
Variable |
Overdamped |
Applications
The dynamics function is used for:
Process Control: Controller design and tuning
System Analysis: Transient behavior characterization
Simulation: Time-domain system simulation
Optimization: Dynamic performance optimization
Safety Analysis: Response to emergency conditions
Computational Implementation
Numerical Methods:
def dynamics(model, t, x, u):
"""
Calculate time derivatives for transport model
Parameters:
-----------
model : TransportModel
Transport model instance
t : float
Current time [s]
x : array_like
State vector
u : array_like
Input vector
Returns:
--------
dx_dt : array_like
Time derivatives of state variables
"""
# Validate state and inputs
x = validate_state(model, x)
u = validate_inputs(model, u)
# Calculate derivatives
dx_dt = model.dynamics(t, x, u)
# Apply physical constraints
dx_dt = apply_constraints(model, x, dx_dt)
return dx_dt
Performance Optimization:
Vectorized Operations: Efficient array computations
Memory Management: Minimal allocation during integration
Parallel Processing: Multiple simulation scenarios
Adaptive Stepping: Variable time step for efficiency
Best Practices
Time Step Selection:
Where \(\tau_{min}\) is the smallest time constant in the system.
Initial Conditions:
Use steady-state values for baseline
Check physical consistency
Consider measurement uncertainties
Integration Monitoring:
Monitor conservation laws
Check for numerical instabilities
Validate against analytical solutions
Technical References
Stephanopoulos, G. (1984). Chemical Process Control: An Introduction to Theory and Practice. Prentice Hall.
Seborg, D.E., Edgar, T.F. & Mellichamp, D.A. (2010). Process Dynamics and Control, 3rd Edition. John Wiley & Sons.
Bequette, B.W. (2003). Process Control: Modeling, Design, and Simulation. Prentice Hall.
Ogunnaike, B.A. & Ray, W.H. (1994). Process Dynamics, Modeling, and Control. Oxford University Press.
See Also
PipeFlow Class - Pipeline transport modeling
PeristalticFlow Class - Peristaltic pump modeling
SlurryPipeline Class - Multiphase slurry transport
steady_state Function - Steady-state analysis functions